Bringing Real Roads into Simulation: Building an External Digital Twin with MORAI
One of the most critical factors in validating and advancing autonomous driving technologies is how realistically the test environment reflects the real world. To address this, MORAI has been developing high-fidelity external digital twins based on real-world driving environments.
This article introduces the external digital twin environment built for the Korea Automobile Testing & Research Institute (KATECH) Proving Ground in Cheonan, explaining how it was constructed and how it can be used. On top of the digital twin environment, remote-controlled vehicles, surrounding traffic, and V2X messages can be observed as part of MORAI’s VAS.
Why External Digital Twins Matter
Autonomous driving systems cannot be validated by algorithms alone. Road geometry, lane structures, intersections, terrain profiles, and surrounding environments all directly influence vehicle behavior and decision-making.
An external digital twin allows developers to:
- Test scenarios repeatedly under identical conditions.
- Safely evaluate risky or rare situations.
- Perform early-stage validation before real-vehicle testing.
This makes simulation a core pillar of autonomous vehicle verification and validation.
Target Environment: KATECH Cheonan Proving Ground
The digital twin covers the entire KATECH Cheonan Proving Ground, a real-world testing facility used for autonomous and connected vehicle experiments.
- Total MMS survey length: approximately 13.2 km.
- Total area: approximately 105,930 ㎡.
Covered areas include:
- Main driving roads.
- Roads near buildings and accommodations.
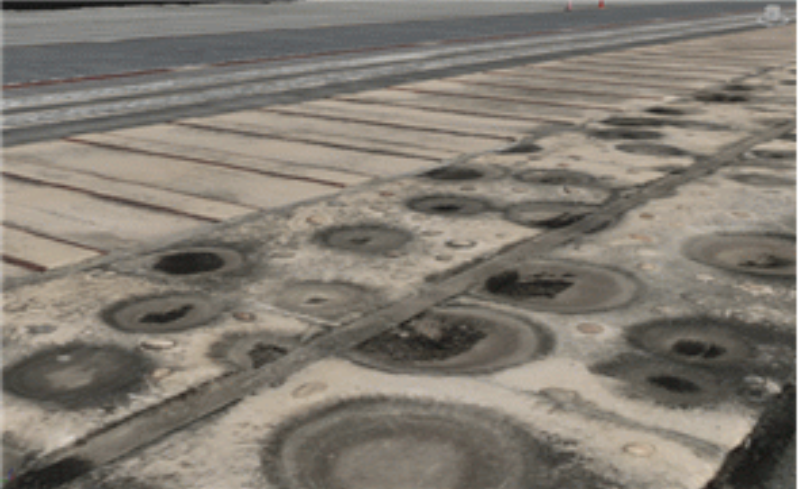
- Standard rough-road and off-road sections.
The goal was to reproduce the testing environment as faithfully as possible.
Starting from High-Precision Measured Data
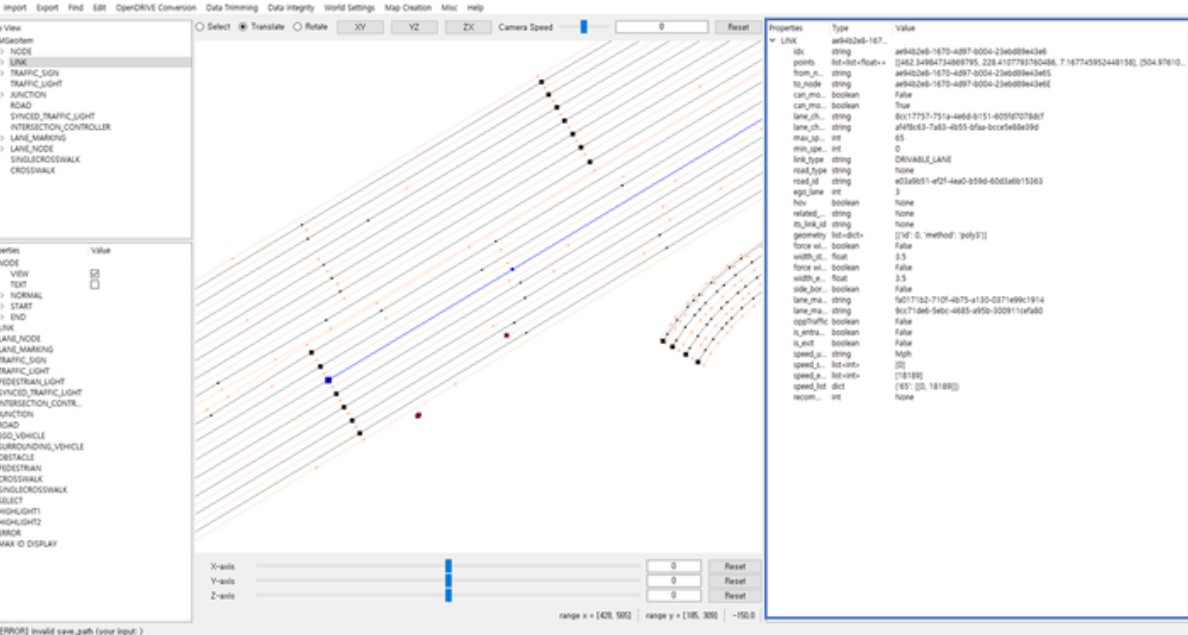
- HD Map–Based Road Structure: The project began with MMS-based high-definition road maps provided by KATECH. These maps were converted into MORAI’s internal simulation format and refined to correct lane topology, road links, traffic signals, signs, and crosswalks.
- Road Mesh Generation and Drivable Environment: Based on the HD map data, road surfaces and lane meshes were generated automatically, supporting realistic driving for both ego vehicles and NPC traffic.
- Enhancing Realism with Drones and Point Clouds: Survey-grade drones were used to collect approximately 7,300 images, producing orthophotos with a resolution of around 8 cm. Compared to satellite imagery, this approach delivers significantly higher fidelity.

- Precise Rough-Road Modeling with LAS Point Clouds: LAS point cloud data was integrated to represent real surface irregularities, enabling realistic testing of vehicle dynamics and suspension behavior.

Integrated Environment: Roads, Buildings, and Vegetation
Key buildings and facilities within the proving ground were recreated using 3D modeling tools. Vegetation was placed using a combination of manual positioning and automated generation.


Results and Expected Use
With this project, MORAI has:
- Completed a high-fidelity digital twin of a real proving ground.
- Established a simulation-ready environment for autonomous driving tests.
- Laid the groundwork for cooperative and connected vehicle scenarios.
The environment is intended to support:
- Ego vehicle driving and scenario testing.
- Cooperative driving and V2X-based evaluations.
- Simulation-driven verification and validation workflows.
Closing Thoughts
An external digital twin is more than a visual replica. It is a core infrastructure that enables safe, repeatable, and realistic validation of autonomous driving systems. By combining precise measurement data, drone-based terrain capture, and simulation-oriented modeling, MORAI continues to bridge the gap between real-world testing and virtual validation.